
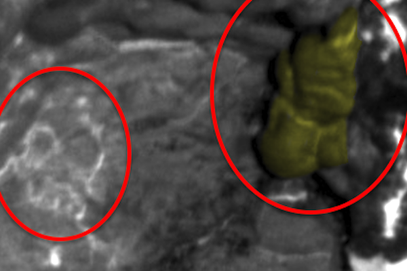
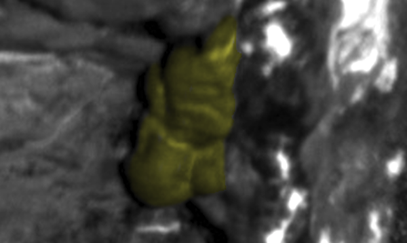
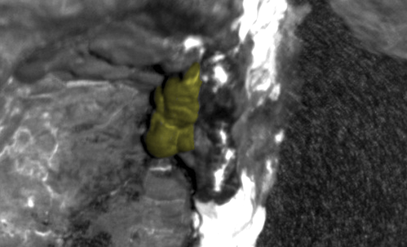
Visage vue de profil droit : grand front plissé avec coiffe , grandes et larges arcades sourcilières, grand nez, bonnes joues, et maxillaire inférieur en retrait, grandes oreilles pointues
L'image encerclé en rouge à gauche pourrait être une gravure d'un squelette facial avec un métal, mais une paréidolie est possible.
Date de découverte: 12 Décembre 2016, photo du 11 décembre 2016
Lieu de découverte: Mars, Sol 1546
NASA source 1: http://mars.jpl.nasa.gov/msl-raw-images/proj/msl/redops/ods/surface/sol/01546/soas/rdr/ccam/CR0_534748330PRC_F0592830CCAM03545L1.JPG
Source NASA 2: http://mars.jpl.nasa.gov/msl-raw-images/proj/msl/redops/ods/surface/sol/01546/opgs/edr/ccam/CR0_534748330EDR_F0592830CCAM03545M_.JPG
NASA source 3: http://mars.jpl.nasa.gov/msl-raw-images/proj/msl/redops/ods/surface/sol/01546/soas/rdr/ccam/CR0_534747558PRC_F0592830CCAM03545L1.JPG
NASA source 4: http://mars.jpl.nasa.gov/msl-raw-images/proj/msl/redops/ods/surface/sol/01546/soas/rdr/ccam/CR0_534747020PRC_F0592830CCAM03545L1.JPG
Source NASA 5: http://mars.jpl.nasa.gov/msl-raw-images/proj/msl/redops/ods/surface/sol/01546/opgs/edr/ccam/CR0_534747020EDR_F0592830CCAM03545M_.JPG
NASA source 6: http://mars.jpl.nasa.gov/msl-raw-images/proj/msl/redops/ods/surface/sol/01546/opgs/edr/ccam/CR0_534747558EDR_F0592830CCAM03545M_.JPG

Ces images proviennent du Rover muni de sa CHEMCAM !
Sur le site du CNES :
La CHEMCAM est un instrument d'analyse élémentaire des roches et des sols autour du rover Curiosity jusqu'à environ 9 mètres. Il utilise la technique d'analyse spectroscopique induite par ablation laser (Laser Induced Breakdown Spectroscopy, LIBS). Un laser de puissance tire sur une cible, ce qui provoque la fusion du matériau et l'apparition d'un plasma que l'on détecte à distance en spectroscopie UV-visible. Cette nouvelle technique jamais embarquée permettra de faire une première analyse sélective des roches environnantes de Mars sans avoir besoin de déplacer le rover. A partir des informations issues de CHEMCAM, le rover pourra alors se positionner près d'une roche afin de faire des analyses plus approfondies. L'expérience est aussi dotée d'une caméra (RMI : Remote Micro-Imager) qui fournit une image à haute résolution de l'échantillon pour décrire le contexte de la mesure LIBS.

Écrire commentaire